En principio, la estructura de comunicaciones de la planta, estaría basada en el siguiente esquema:
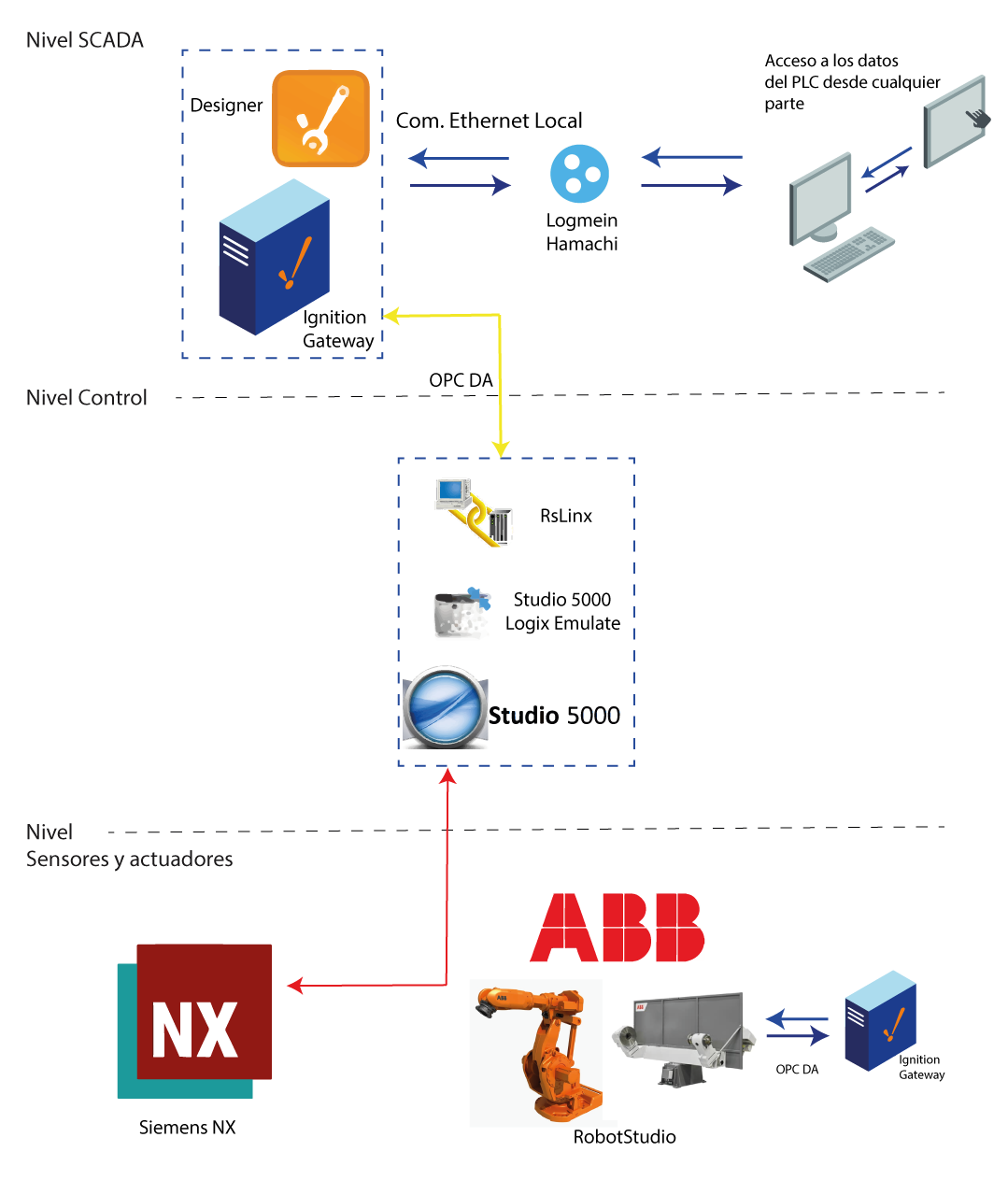
Se observa que a la hora de implementar la planta con componentes reales, el nivel de comunicaciones entre SCADA y Control, serían siendo por medio del protocolo OPC DA/UA, mientras que para para comunicar los niveles de Control y el nivel de actuadores, requeririamos de redes ModBus-TCP e incluso DeviceNet para sacar provecho al controlador del robot.
A continuación, se presenta la comunicación por OPC entre ignition y NX
A continuación, se presenta la comunicación por OPC entre ignition y Robot Studio